Robô Raspberry Pi 4 TURTLEBOT3 Burger Robotis RPi4 2GB
Modelo:Burger

Modelo:Burger
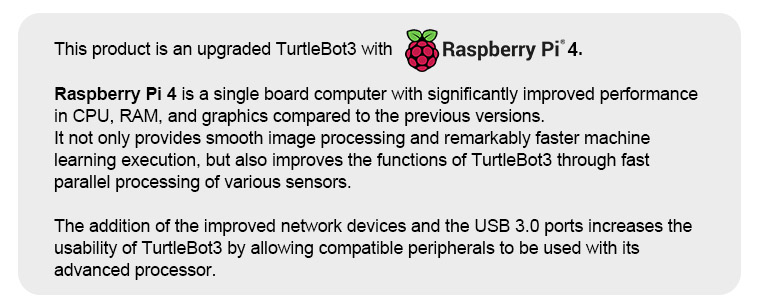
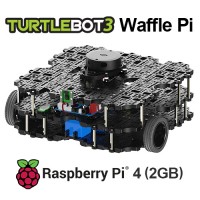
O Robô TurtleBot3 Burger com Raspberry Pi 4 (2GB) da Robotis é uma plataforma robótica móvel compacta, modular e de código aberto, desenvolvida para ensino, pesquisa e desenvolvimento em robótica e inteligência artificial.
Este robô é amplamente utilizado em universidades, laboratórios e centros de inovação para experimentação com navegação autônoma, ROS (Robot Operating System) e algoritmos de controle.
Equipado com o Raspberry Pi 4 (2GB) e a placa de controle OpenCR, o TurtleBot3 Burger integra sensores essenciais como LiDAR 2D (LDS), IMU e encoders de precisão. Esses componentes permitem a realização de mapeamento de ambientes (SLAM), detecção de obstáculos e navegação autônoma com alta confiabilidade, transformando o conjunto em uma plataforma completa para desenvolvimento de aplicações robóticas avançadas.
A operação é altamente flexível e orientada à produtividade técnica, com suporte nativo ao ROS/ROS2, permitindo programação personalizada, simulações e integração com diversas ferramentas de desenvolvimento. A conectividade via Wi-Fi possibilita controle remoto, monitoramento em tempo real e troca de dados com sistemas externos, acelerando o desenvolvimento de projetos em ambientes acadêmicos e industriais.
O design do TurtleBot3 Burger é leve, compacto e modular, facilitando montagem, manutenção e expansão com novos sensores e atuadores. Sua estrutura robusta, aliada à padronização dos componentes, garante confiabilidade durante testes e experimentos contínuos, além de excelente portabilidade para uso em diferentes ambientes de pesquisa.
O TurtleBot3 Burger com Raspberry Pi 4 é uma solução profissional para desenvolvimento em robótica móvel, sendo referência global em ensino e P&D. Ele combina acessibilidade, alto desempenho e compatibilidade com padrões industriais, tornando-se uma plataforma ideal para validação de algoritmos, automação e aplicações de inteligência artificial.
A partir de fevereiro de 2022, os kits TurtleBot3 contêm uma nova revisão do sensor LDS.
O novo sensor LDS não é compatível com modelos anteriores de USB2LDS.
Uma nova revisão do USB2LDS, juntamente com os cabos necessários, estão incluídos no Kit TurtleBot3.