Atuadores à prova d'água robotis dynamixel xw540-t260-r
Modelo:XW540-T260-R



Modelo:XW540-T260-R
O atuador à prova d’água ROBOTIS DYNAMIXEL XW540-T260-R é um servo atuador inteligente de alto torque desenvolvido pela ROBOTIS para aplicações em robótica avançada, automação industrial e sistemas que operam em ambientes severos.
Projetado para oferecer controle preciso de movimento com alta robustez, este modelo é amplamente utilizado em robôs móveis, manipuladores industriais, sistemas subaquáticos e equipamentos autônomos.
O equipamento incorpora encoder absoluto magnético sem contato, garantindo alta resolução e confiabilidade na leitura de posição, além de eliminar desgaste mecânico. Conta com controle PID embarcado e múltiplos modos de operação, incluindo posição, velocidade, torque, controle baseado em corrente e PWM. Esses recursos proporcionam precisão, repetibilidade e controle dinâmico, mesmo em aplicações que exigem alto torque e estabilidade.
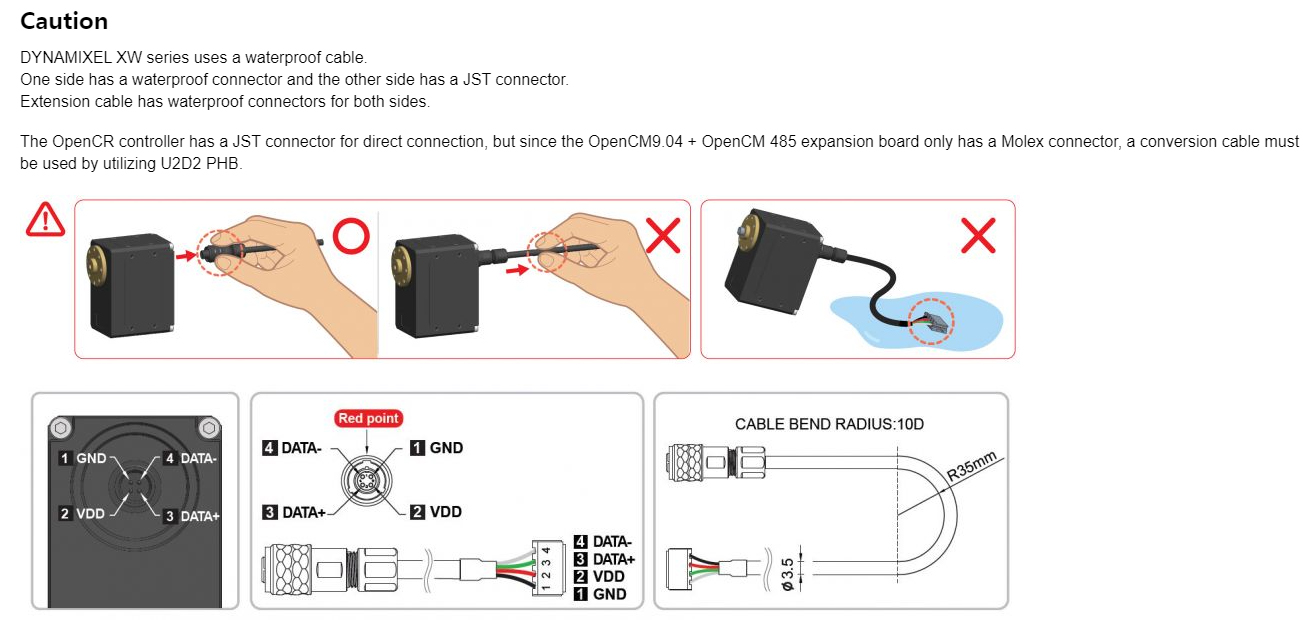
Na operação, o DYNAMIXEL XW540-T260-R utiliza comunicação digital RS485 com suporte aos protocolos 1.0 e 2.0, permitindo integração eficiente com CLPs, microcontroladores e sistemas embarcados. O feedback em tempo real de parâmetros como posição, corrente, temperatura e tensão possibilita monitoramento contínuo, otimização de desempenho e redução de falhas, aumentando a produtividade em sistemas automatizados.
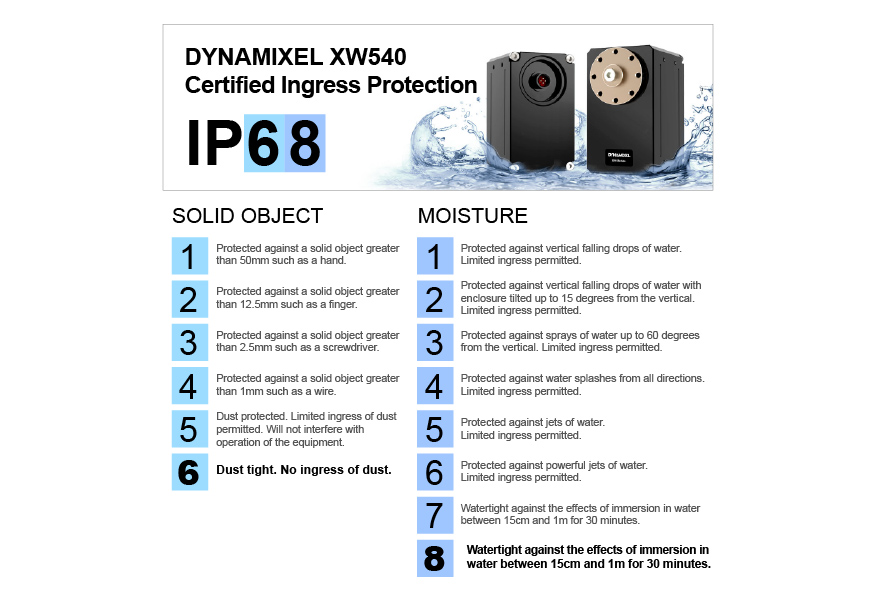
Sua construção robusta com corpo metálico e vedação completa garante proteção IP68, permitindo operação em ambientes com poeira, umidade intensa e até submersão. O conjunto mecânico com engrenagens metálicas de alta resistência e sistema eficiente de dissipação térmica assegura longa vida útil, mesmo sob cargas elevadas e condições adversas.
Como solução profissional, o atuador ROBOTIS DYNAMIXEL XW540-T260-R se destaca pela confiabilidade, alto torque e versatilidade de controle, sendo ideal para aplicações industriais, pesquisa e desenvolvimento em robótica de alto desempenho.